智能感知
基于视觉、雷达与AIS的多传感器融合,面向复杂海况的稳健目标检测与跟踪。
以严新平院士提出的新一代航运系统为架构,武汉理工大学船艇智能航行学习小组(Intelligent Navigation for Surface Vehicles, INSV)围绕船艇智能航行的关键技术开展研究, 包括但不限于: 目标探测与跟踪、态势感知与风险评估、航迹规划与避碰控制、多源数据融合定位、 数字孪生与仿真平台、以及实船试验验证等方向。
基于视觉、雷达与AIS的多传感器融合,面向复杂海况的稳健目标检测与跟踪。
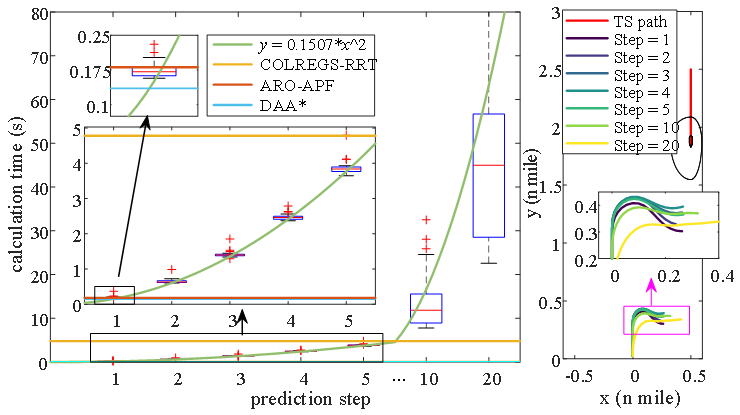
结合规则约束与学习算法的航迹规划、避碰策略与安全评估。
高精度定位、状态估计与自主操纵控制,实现端到端的闭环能力。
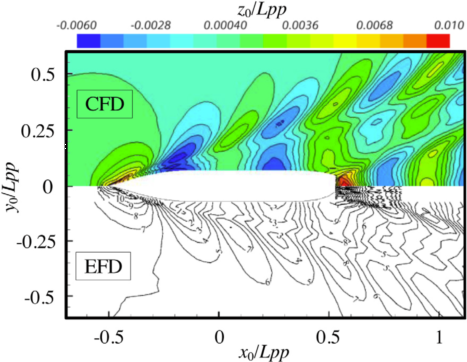
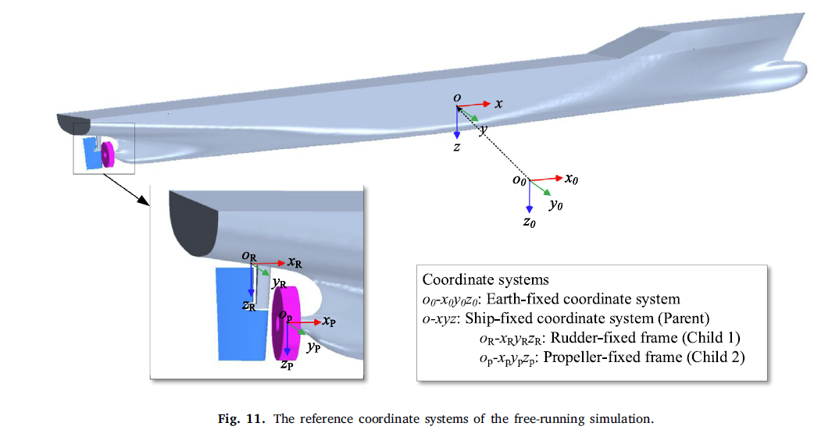
构建高保真仿真环境与数字孪生,开展半实物与实船试验验证。
合作与招生相关事宜欢迎联系:
武汉理工大学 - 教育部直属全国重点大学,首批列入国家“211工程”和“双一流”建设高校
智能交通系统研究中心 - 专注于智能交通领域技术创新
船艇智能航行学习小组 - 致力于船艇智能航行技术研究